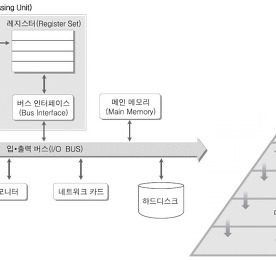
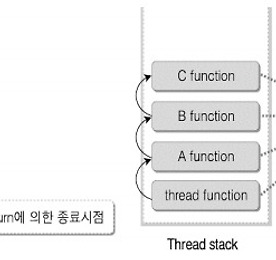
메모리 블록 썸네일형 리스트형 메모리 계층(Memory Hierarchy) 메모리 종류 : 1. 메인(Main) 메모리 : 램(RAM) (D램) 2. 레지스터(Register) : CPU 안에 내장되어 있어서 연산을 위한 저장소 제공 3. 캐쉬(Cache) : S램. CPU와 램사이에서 중간 저장소 역할 4. 하드디스크(Hard Disk)와 이외 장치 : 하드 디스크, I/O 장치 등등 메모리 계층 구조(Memory Hierarchy) : 메모리들은 프로그램이 실행하는 동안 데이터의 입력 및 출력을 담당한다. 메모리들의 차이는 CPU 와의 거리에서 온다. CPU와의 거리가 가까울수록 빠르고 용량이 작으며 멀수록 느리고 용량이 크다.(기술과 돈의 문제) 하드디스크에 있는 내용은 프로그램의 실행을 위해 메인 메모리로 이동한다. 메인 메모리에 있는 일부 데이터도 실행을 위해 L2 캐.. 더보기 쓰레드(Thread)의 생성과 소멸 쓰레드 생성 : HANDLE CreateThread( LPSECURITY_ATTRIBUTES lpThreadAttributes, // 보안속성(TRUE : 상속, NULL : 상속제외) SIZE_T dwStackSize, // 쓰레드의 스택 크기 LPTHREAD_START_ROUTINE lpStartAddress, // 쓰레드로 동작하기 위한 함수(쓰레드 main) // 리턴타입 DWORD, 매개변수 타입 LPVOID(void*) LPVOID lpParameter, // 쓰레드 함수에 전달할 인자 지정 DWORD dwCreationFlags, // 쓰레드 생성 및 실행을 조절 LPDWORD lpThreadId // 쓰레드 ID를 전달받기 위한 변수의 주소값 ); 쓰레드 소멸 : 1. return(일반적,.. 더보기 이전 1 다음